- Gerar link
- Outros aplicativos
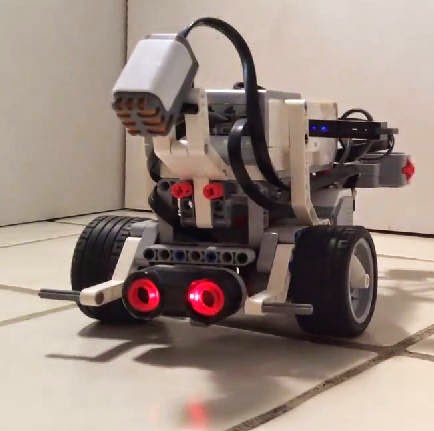
Leve o conectoma de um verme e transplantá-lo como software em um robô Lego Mindstorms EV3 - o que acontece em seguida?
É uma questão filosófica de pé profunda e longa. Estamos apenas a soma de nossas redes neurais. É claro que, se você trabalha em AI você tomar a resposta principalmente para concedido, mas até que alguém constrói um cérebro humano e muda-lo em nós realmente não temos um exemplo concreto do princípio em ação.
O verme nematóide Caenorhabditis elegans ( C. elegans ) é pequena e tem apenas 302 neurônios. Estes foram completamente mapeado eo OpenWorm projeto está trabalhando para construir uma simulação completa do verme em software. Um dos fundadores do projeto OpenWorm, Timothy Busbice, tomou a conectoma e implementou um programa de neurônio orientada a objeto.
O modelo é preciso em suas conexões e faz uso de pacotes UDP para os neurônios disparam. Se dois neurónios têm três ligações sinápticas, em seguida, quando o primeiro neurónio dispara um pacote UDP é enviado para o segundo neurónio com a carga de "3". Os neurônios são abordados por IP e número de porta. O sistema utiliza um algoritmo de integrar e fogo. Cada neurônio soma os pesos e incêndios se exceder um limite. O acumulador é zerado se nenhuma mensagem chega em uma janela de 200ms ou se o neurônio incêndios. Isso é semelhante ao que acontece na rede neural real, mas não exata.
O software funciona com sensores e processadores de efeitos fornecidos por um robô LEGO simples. Os sensores são amostrados a cada 100ms. Por exemplo, o sensor de sonar no robô é ligado como o nariz do worm. Se alguma coisa vem dentro de 20 cm do "nariz" pacotes UDP depois são enviados para os neurônios sensoriais na rede.
A mesma ideia é aplicada aos 95 neurônios motores, mas estes são mapeados a partir das duas fileiras de músculos do lado esquerdo e direito para os motores direito e esquerdo de robô. Os sinais motores são acumulados e aplicada para controlar a velocidade de cada motor. Os neurónios motores podem ser excitadoras ou inibidoras e positivo e pesos negativos são utilizados.
Alega-se que o robô se comportaram de modo que são semelhantes aos observados C. elegans . Estimulação do nariz parou de movimento para a frente. Tocando os sensores anterior e posterior toque fez a jogada robô frente e para trás em conformidade. Estimular o sensor de alimentos fez o movimento do robô para a frente.
O ponto-chave é que não havia programação ou aprendizagem envolvidos para criar os comportamentos. O conectoma do worm foi mapeada e implementado como um sistema de software e os comportamentos emergir.
O conectome só pode ser constituída por 302 neurônios, mas é auto-estimulante e é difícil entender como ele funciona - mas ele faz.
Atualmente o modelo conectoma está sendo transferido para um Raspberry Pi e um auto-suficiente Pi robô está sendo construído. Sugere-se que ele pode ter aplicação prática como uma espécie de sensor de celular - a explorar seu ambiente e reportando resultados. Dada a sua gama limitada de comportamentos, parece pouco provável que seja de valor prático, mas dado mais neurônios isso pode mudar.
A Worm's Mind In A Lego Body
Lucy - I-Programmer- OnLine